www.obiuan.net





|
 Assemblaggio parte meccanica
Assemblaggio parte meccanica
|
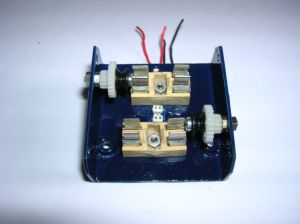
Fig.1 Iniziamo col fissare I due connettori che alimenteranno I motori. Come da fig.1 si può vedere, si tratta di inserire I due connettori appaiati e all'interno della scocca (lunghezza dei fili 50 -60 mm) e con della colla fissarli sul supporto. Fate attenzione che la colla non entri nei fori. Per evitare questo inserire due connettori di prova nei fori. Lasciare asciugare bene la colla prima di andare avanti. |

|
Fig. 2 Prendere ora due delle tre viti M2 o M2,5 x 20 mm utilizzate come struttura per le piastre elettroniche e avvitarle nelle relative sedi posteriori con I dadi fino a bloccarli leggermente sul supporto. Ora utilizzare una goccia di colla per fissare i dadi sul supporto. A colla asciutta rimuovere le viti. I dadi incollati saranno già in posizione per il montaggio dell'elettronica di bordo. Vedi fig. 2 i dadi incollati senza viti. |

|
Fig. 3 Volendo ora è il momento di verniciare il nostro telaio utilizzando il colore che più ci piace. Attenzione solo a non colorare anche i connettori e la filettatura dei due dadi. Consiglio...Prima di effettuare la verniciatura è meglio verificare se gli ingranaggi una volta montati non richiedono ulteriori modifiche dei fori in fase di registrazione. Idem per le asole dei supporto motori. |

|
Fig. 4 Il passo sucessivo è invece quello di montare la ruota dentata con la puleggina nella sua sede come in figura 4. Si tratta di inserire l' alberino nel gruppo dopo averlo lubrificato e avvitare un dado sull'albero inizialmente fino a battuta . Ora inserire l'albero nel foro apposito e avvitare un altro dado. Utilizzando due chiavi avvitare leggermente i due dadi facendo in modo che la ruota sia libera di girare sull' alberino. Importante. Non bloccare ancora il gruppo visto che bisognerà effettuare la regolazione dei due ingranaggi quando anche l'albero principale con la sua ruota dentata sarà montata. |

|
Fig. 5 Eseguire le stesse operazioni descritte per la figura 4 anche per il gruppo della parte opposta. In figura 5 vediamo I due gruppi e connettori assemblati fin'ora. Come già detto sopra è importante che le due ruote siano libere di girare e che i due dadi M2 non siano ancora bloccati. |

|
Fig. 6 Step sucessivo.....Montiamo ora i supporto motori. Recuperiamo i due portafusibili modificati e due viti M2 x 5 mm . I dadi M 2 sono già fissati nella sede del supporto motore e lo fissiamo provvisoriamente con la relativa vite nella sua asola. Procedere allo stesso modo anche per l' altro supporto motori. Come avrete sicuramente notato il portamotori è in interferenza |
|
Fig. 7 con la testa della vite messo precedentemente. Se fosse eccessiva è meglio modificare una delle parti di aggancio con una limetta fino a riuscire a ruotare il supporto motori sul suo asse. Inoltre, la posizione in cui sono stati montati albero e supporto motori non permette all'oring di uscire dalla sua sede. Posizioniamo ora anche I due oring da 12,5 mm di diametro interno sulle pulegge, ruotando sul suo asse il supporto motore e una volta inseriti, riposizioniamo il supporto motore bloccandolo leggermente con la loro relativa vite. In fig. 7 vediamo I due supporto motori provvisoriamente montati e gli oring in sede sulle puleggine. Dimenticavo....Le due viti M2 x 5, devono avere la testa ribassata a 1mm o meno, per evitare che tocchino le piste del ponte H. Utilizzare quindi una limetta da ferro, per ribassare la testa e attenzione a non rovinare la filettatura della vite stringendola nella morsa. Avvitare prima un dado fino a battuta e bloccare il dado nella morsa. Rieseguire con un seghetto da ferro l'intaglio, per poter avvitare la vite se durante la fase di limatura della testa fosse scomparsa. |
|
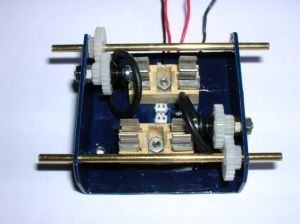
Fig. 8 Prendiamo ora i due alberi di trasmissione e i due ingranaggi ribassati a 4 mm. Posizioniamo una ruota come in fig. 8 e inseriamo l'alberino fino a che fuoriesca dal foro opposto del telaio. Come potete vedere la ruota appena messa è bloccata tra la ruota di riduzione e il telaio. In queste condizioni la ruota dentata sull'albero è ancora da posizionare e fissare con una goccia di colla; prima di fare questo però, bisogna verificare che le due ruote ingranino liberamente senza attriti. Se così non fosse, abbiamo due possibilità: la prima è quella di rismontare l'albero con la puleggia, e di asolare con una limetta tonda il foro. La seconda invece, è quella più semlpice, si tratta di portare il foro da 2mm a 3mm, per fare in modo che l'alberino, possa essere regolato in fase di montaggio. Questa soluzione è valida solo se l'errore di foratura, è inferiore ai 0,3 - 0,4 mm. Resta comunque il fatto che le due ruote, devono ingranare senza attriti apprezzabili. Procedere allo stesso modo anche per l'altro alberino, fino ad avere tutti e due gli alberi posizionati. |
|
Fig. 9 Si tratta ora di inserire le 4 ruote munite di boccole sui due assi. In figura 9 vediamo le 4 ruote montate sugli alberini principali. Attenzione che due delle 4 ruote esattamente (come in figura 9) l'anteriore destra e la posteriore sinistra devono poter girare liberamente (in folle) sulle relative boccole. Le altre due invece devono fare corpo unico con gli alberi. Per fare questo, è sufficente incollare le due boccole sulle ruote anteriore sinistra e posteriore destra se l'nterfereza foro boccola e albero sia tale da non permettere a tutte e quattro le boccole di ruotare su di esse. Verificare ora che gli alberini siano liberi di girare nelle loro sedi senza interferenze con le boccole appena inserite. Se così non fosse è sufficente dare un po di gioco alle boccole in modo tale che non vadano a interferire sui bordi del telaio. Si tratta ora di posizionare la ruota dentata dell'albero e incollarla ad esso nel caso l'attrito di accoppiamento con l'albero, non fosse sufficente. Ingrassiamo ora leggermente gli ingranaggi e I 4 fori di inserimento degli alberi principali sui due fianchi, facedo attenzione a non ingrassare anche le sedi delle due puleggine. |
|
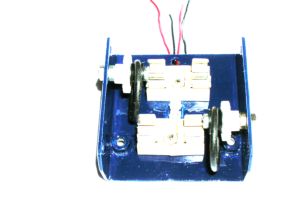
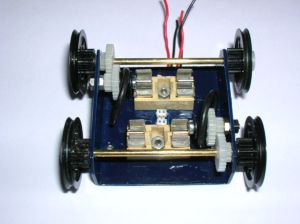
Fig. 10 Andiamo avanti.......Inseriamo ora I 4 oring da 18 mm che fungono da copertone sulle ruote e i due motoriduttori nelle sedi del supporto motori (fig. 10). Fate in modo che I cavi dei motori, restino all'interno e sotto al supporto motori e ancora che i connettori, si possano inserire agevolmente nei connettori sottostanti usando delle pinzette. Ora...Inseriamo I due oring che fungono da cinghie nelle |
|
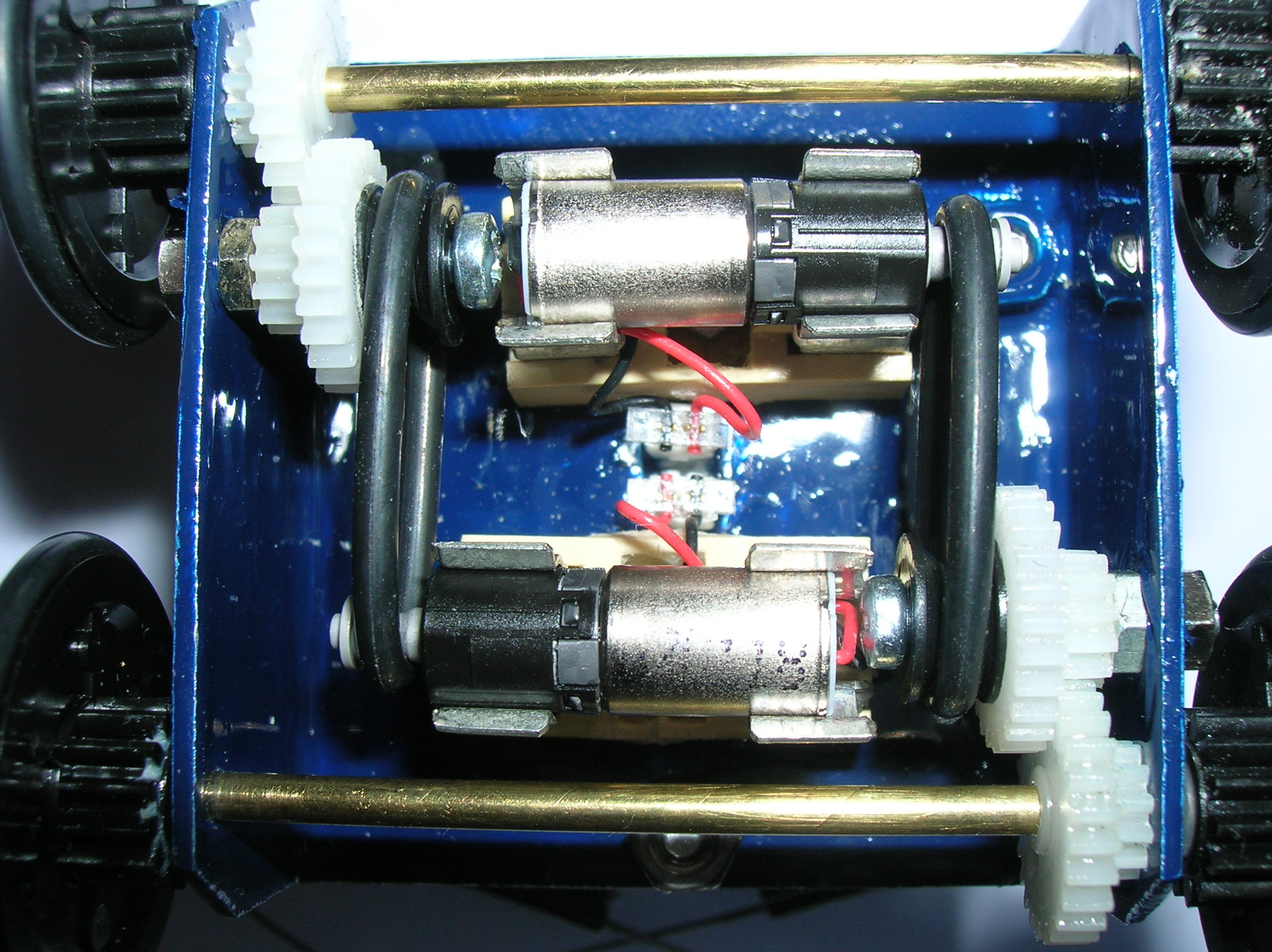
Fig. 11 puleggine delle ruote e dei motori utilizzando sempre delle pinzette. Si tratta ora di tendere la cinghia, regolando i due supporto motori nell'asola. Le cinghie non devono essere tirate. Nella fig. 11 si può vedere come si presenta la cinghia regolata in modo ottimale. Notate la forma ovalizzata della cinghia. Chiudere bene ora le viti mantenendo il parallelismo dei supporto motori con gli alberi. Regolare ora la posizione in asse dei motori, fino ad avere le cinghie posizionate correttamente. Inserire ora i connettori come in fig. 10 rispettando la polarità come in figura. A questo punto tutta la parte necessaria al moto del robot è stata completata. Non ci resta che montare anche le due schede già connesse (vedi parte elettronica) e alimentazione (vedi tutorial) e finalmente MikroBot è pronto a eseguire I suoi primi movimenti ma....questo lo vedremo nella sezione Assemblaggio finale |




|
I contenuti di questo sito sono per uso didattico e/o amatoriale. L'utilizzo commerciale non è consentito. L'autore declina ogni responsabilità per danni arrecati a cose e/o persone in conseguenza alla realizzazione e/o all'uso dei progetti presentati in questo sito. |